Pulidora robótica: acabado de superficies automatizado de alta precisión





Diagrama detallado
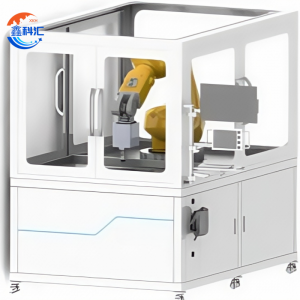

Descripción general de la máquina pulidora robótica
La pulidora robótica es un sistema avanzado de procesamiento de superficies totalmente automatizado, diseñado para satisfacer las más altas exigencias de la fabricación de precisión. Combina control robótico de seis ejes, tecnología de pulido con retroalimentación de fuerza y una configuración de doble cabezal para manipular una amplia gama de materiales y geometrías complejas con una precisión y consistencia excepcionales.
Ya sea para lentes ópticas, piezas aeroespaciales, componentes de ingeniería de precisión o aplicaciones de semiconductores, esta máquina ofrece acabados de superficie estables, repetibles y de alta calidad, incluso con tolerancias a nivel nanométrico.


Compatibilidad completa de piezas de la pulidora robótica
El sistema admite el procesamiento de:
-
superficies planasPara placas de vidrio, cerámica y metal
-
Formas cilíndricas y cónicastales como rodillos, ejes y tubos
-
Componentes esféricos y asféricospara sistemas ópticos
-
Superficies de forma libre y fuera del ejecon curvas complejas y transiciones
Su versatilidad lo hace adecuado paraTanto la producción en masa como la fabricación personalizada de alta precisión.
Características y beneficios principales de la pulidora robótica
1. Tecnología de cabezal de pulido doble
-
Equipado conrotación únicayautorrotaciónCabezales de pulido para mayor flexibilidad.
-
La capacidad de cambio rápido de herramientas admite múltiples modos de procesamiento sin tiempos de inactividad prolongados.
-
Ideal para alternar entre etapas de pulido grueso y fino.
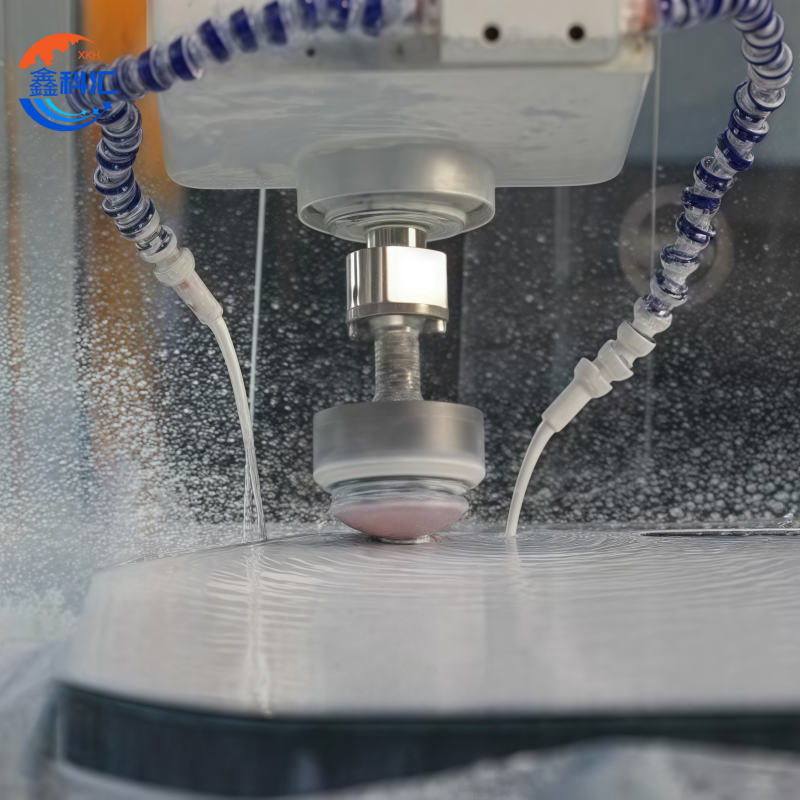
2. Sistema de control de fuerza de precisión
-
Monitoreo en tiempo real dePresión, temperatura y flujo de fluido de pulido.
-
La aplicación constante de fuerza garantiza un acabado superficial uniforme en toda la pieza de trabajo.
-
Capaz de adaptarse a las irregularidades de la superficie de forma automática.
3. Control robótico de seis ejes
-
Total libertad de movimientos para manejar geometrías complejas.
-
Trayectorias de movimiento suaves y precisas calculadas mediante algoritmos avanzados.
-
Alta precisión de posicionamiento de repetición de ±0,04 mm a ±0,1 mm según el modelo.
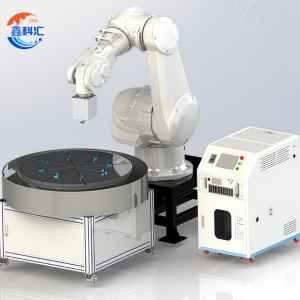
4. Automatización y medición inteligentes
-
Herramientas de autocalibración para una configuración y alineación precisas.
-
Sistema de medición de coordenadas para un posicionamiento preciso.
-
OpcionalMonitoreo de espesor en líneapara el control de calidad en tiempo real.
5. Calidad de construcción de grado industrial
-
El diseño de servomotor doble aumenta la eficiencia y la estabilidad del pulido.
-
La estructura mecánica rígida minimiza la vibración y garantiza la durabilidad a largo plazo.

Especificaciones técnicas de la pulidora robótica
| Modelo de equipo | Cuerpo de robot | Precisión de posicionamiento repetido | Rango de diámetro de procesamiento | Cabezal de pulido de una sola rotación | Cabezal de pulido multirotación | Herramienta pequeña | Pulido de tipo rueda principal | Pulido de cabeza esférica | Fin del cambio rápido | Herramienta de calibración automática | Cabezal de medición de coordenadas | Monitoreo de espesor en línea | Plataforma de control numérico |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / rango completo | Φ50~Φ500 mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / rango completo | Φ50~Φ600 mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / rango completo | Φ80~Φ800 mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / rango completo | Φ100~Φ1000 mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / rango completo | Φ100~Φ1000 mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / rango completo | Φ200~Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / rango completo | Φ200~Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Preguntas frecuentes sobre pulidoras robóticas
1. ¿Qué tipos de piezas de trabajo puede manipular la máquina pulidora robotizada?
Nuestra pulidora robotizada admite diversas formas y superficies, incluyendo planas, curvas, esféricas, de forma libre y con contornos complejos. Es adecuada para componentes ópticos, moldes de precisión, superficies metálicas y otras aplicaciones de pulido de alta precisión.
2. ¿Cuál es la diferencia entre los cabezales de pulido de rotación simple y de rotación múltiple?
-
Cabezal de pulido de una sola rotación:La herramienta gira alrededor de un solo eje, ideal para el acabado de superficies estándar y la eliminación de material a alta velocidad.
-
Cabezal de pulido multirotación:La herramienta combina la rotación con la autorrotación (orbital), lo que permite un pulido más uniforme en superficies curvas e irregulares.
3. ¿Cuál es el diámetro máximo de procesamiento?
Dependiendo del modelo:
-
Los modelos compactos (por ejemplo, IRP500S) manejanΦ50–Φ500 mm.
-
Los modelos a gran escala (por ejemplo, IRP2000AD) manejan hastaΦ2000 mm.
Sobre nosotros
XKH se especializa en el desarrollo, la producción y la venta de vidrio óptico especial y nuevos materiales cristalinos de alta tecnología. Nuestros productos se utilizan en la electrónica óptica, la electrónica de consumo y el sector militar. Ofrecemos componentes ópticos de zafiro, cubiertas para lentes de teléfonos móviles, cerámica, LT, SIC de carburo de silicio, cuarzo y obleas de cristal semiconductor. Gracias a nuestra experiencia y equipos de vanguardia, nos destacamos en el procesamiento de productos no estándar, con el objetivo de convertirnos en una empresa líder en materiales optoelectrónicos de alta tecnología.

Productos relacionados
-

Oblea de sustrato de SiC 4H-semi HPSI de 2 pulgadas Producti...
-
Caja de transporte cuadrada personalizada, caja con ventana cuadrada...
-

Oblea de sustrato de carburo de silicio HPSI SiC de 6 pulgadas...
-

Corindón de zafiro para cristal de piedras preciosas Al2O3 ru...
-

Sustrato de monocristal de metal de aluminio pulido...
-

Oblea recubierta de oro, oblea de zafiro, oblea de silicio...